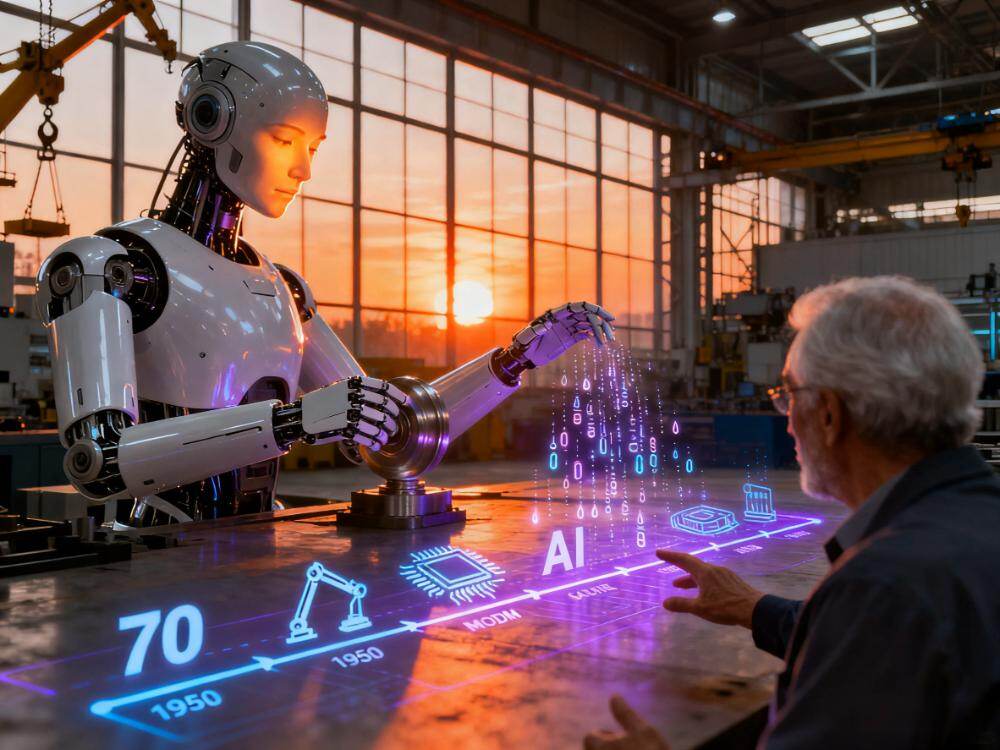
机器人,这个曾经只存在于科幻作品中的概念,如今已成为现实生活的一部分。经过70年的发展,机器人从简单的机械臂演变为能够自主学习的智能体。这个过程不仅体现了技术进步,更反映了人类对机器智能的不懈追求。近年来,随着大语言模型等人工智能技术的突破,一种新的智能形态——具身智能逐渐走入我们的视野。它不再仅仅是计算机中的软件,而是通过物理实体与真实世界连接、交互的智能体。这场跨越半个多世纪的进化,正在重新定义人与智能的关系。
一、机器人技术的三个发展阶段
机器人技术的发展,是硬件躯体与软件智能不断融合的过程。这个过程大致可以分为三个阶段。
第一个阶段是从20世纪50年代到80年代。这一时期的机器人相当于“没有大脑的躯体”。1954年,世界上第一台工业机器人诞生。它能通过液压驱动完成抓取、焊接等重复动作,但其智能仅限于预先编制好的程序,对外界环境变化没有适应能力。这种以机械臂为代表的机器人,核心功能是运动控制,主要用于替代人工完成危险、艰苦的重复性劳动。
第二个阶段从20世纪90年代持续到21世纪初。随着计算机、光电技术和传感器等领域的进步,机器人开始具备感知外部环境的能力。1997年,第一款能够识别障碍物、规划行走路径的人形机器人问世。2002年,自动清扫机器人通过红外和碰撞传感器感知环境并自主工作。这一阶段的机器人实现了“感知-执行”闭环,但智能仍局限于特定场景,无法应对复杂环境变化。
第三个阶段从2010年延续到2022年。移动互联网和深度学习的爆发,让机器人从“单个执行机器”升级为“与人交互的智能体”。语音助手、服务机器人开始投入使用,这些机器人通过语音、图像与人类交互,甚至能完成简单决策。但它们的智能仍依赖预设规则和云端计算,缺乏真正的自主学习和环境适应能力。
二、大模型:为机器人装上“大脑”
2022年以来,大模型的快速发展为机器人技术带来了质的飞跃。如果说机械躯体是具身智能的“四肢”,那么大模型就是它的“大脑”。
传统机器人的智能是“碎片化”的,针对每个任务都需要编写特定算法。而大模型通过海量数据训练,具备了跨模态理解、知识迁移和上下文学习的能力。例如,当大模型与机器人结合后,只需要用自然语言发出指令,机器人就能理解指令含义并规划相应动作,这大大降低了编程的复杂性。
不过,大模型最初擅长的是语言交互,而具身智能需要实际行动。研究人员通过“具身微调”技术,让大模型在虚拟环境中学习控制机器人完成任务,再将这些经验迁移到真实机器人上。这种方法让大模型逐渐“学会”了如何行动。
三、具身智能的核心特征与发展趋势
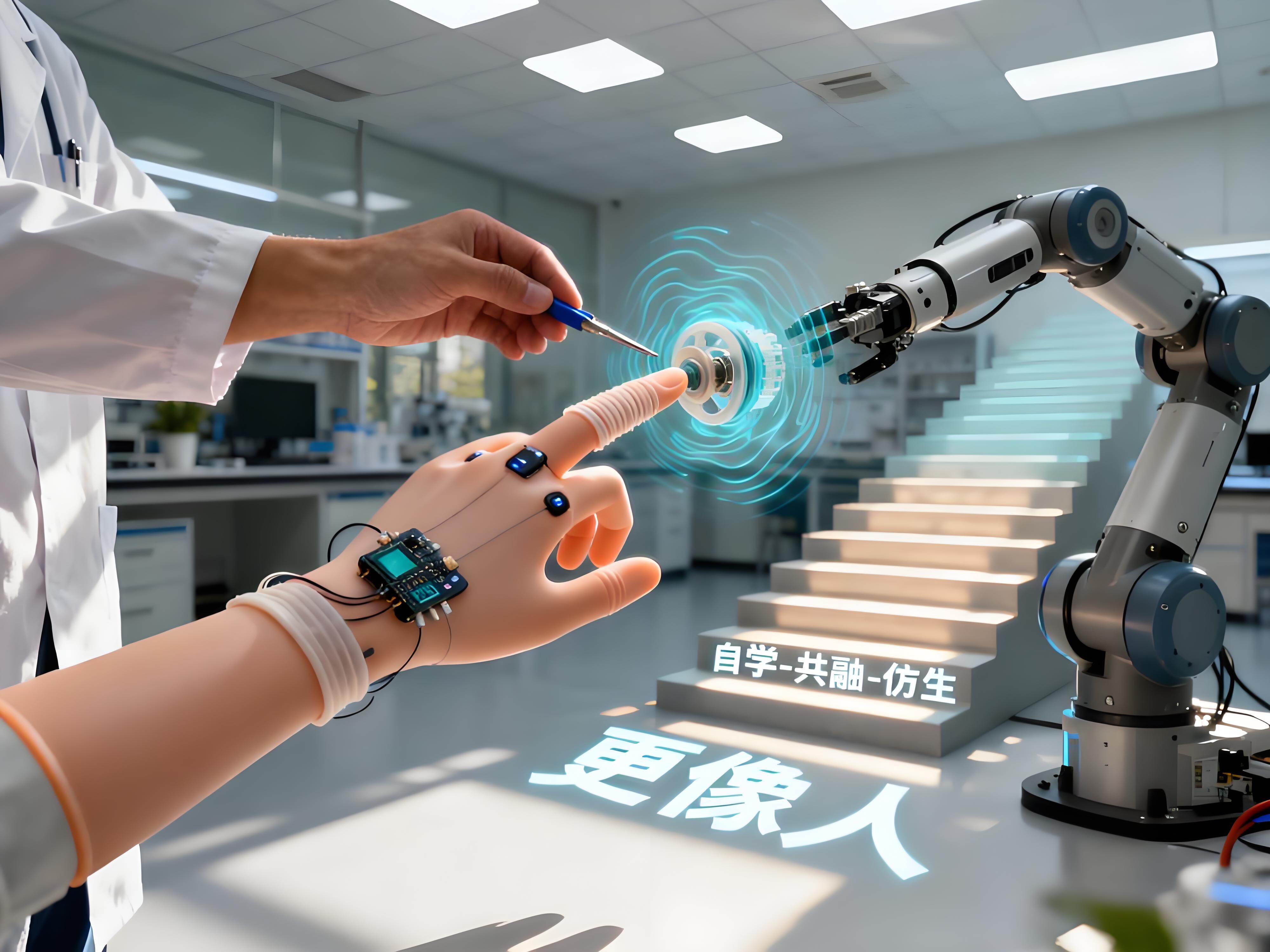
具身智能的核心在于“具身性”与“交互性”。具身性指的是拥有物理躯体,能通过躯体感知环境;交互性是指能与物理世界动态交互,并通过交互学习优化行为。与传统人工智能在计算机中思考不同,具身智能是在真实世界中学习。
当前,具身智能正朝着“更像人”的方向发展,呈现出四大趋势。首先是多模态融合感知,机器人不再依赖单一传感器,而是像人类一样综合运用多种感官。其次是自主化学习能力,机器人从“人类教”转向“自己学”,可以通过观察模仿来掌握新技能。第三是人机协作能力,从简单的人机分工发展到深度的人机共融。最后是柔性化与仿生设计,机器人躯体从刚性机械向柔性仿生进化。
四、五大关键技术支撑
实现从机器人到具身智能的跨越,需要在五个关键技术领域取得突破。
多模态感知技术让智能体具备类似人类的五种感官功能。视觉系统需要高分辨率摄像头和激光雷达,触觉系统需要柔性传感器,听觉系统需要降噪麦克风阵列,嗅觉和味觉系统则依赖气体和化学传感器。
运动控制与驱动技术是机器人的“肌肉”与“关节”。仿生关节需要模拟人类关节的多自由度运动,柔顺控制则要通过力反馈算法让机器人动作更加轻柔。
决策与智能算法模仿人类的思考逻辑。强化学习让机器人通过试错优化行为,迁移学习帮助它将一个场景的经验应用到另一个场景,因果推理让它理解动作与结果的关系。
能源与材料技术决定了智能体的续航能力与韧性。柔性材料让机器人躯体更灵活安全,高密度电池和无线充电技术则解决了续航问题。
人机交互技术包括自然语言交互和非语言交互。在大模型支持下,机器人能理解更复杂的语音指令,同时也能识别手势、表情等非语言信息。
五、具体区域的发展实践
以某个大型城市为例,该地区正在成为具身智能技术研发与应用的前沿阵地,形成了政策引导、企业主导、产学研协同的发展格局。
在政策支持方面,该城市的多项规划明确将具身智能列为重点发展领域。2023年发布的机器人产业发展方案专门支持人机协作机器人和仿生机器人研发。2025年发布的行动计划设立了政府投资基金,重点支持人工智能等未来产业。
在产业发展方面,科研机构努力突破核心技术。某自动化研究所面向国家重大需求,研发了系列人形机器人,突破了多项关键技术。某研究院推出的开放平台为企业提供感知算法和训练数据集。高校在理论创新与核心零部件研究方面表现突出,多个高校实验室在柔性传感器、脑机接口等技术上处于领先地位。企业则专注于实际应用研发,多款人形机器人已在商场、高危环境等场景中投入使用。
在场景落地方面,具身智能与实体经济深度融合。在制造业,人机协作机器人能与工人共同组装产品,显著提升生产效率。在医疗服务领域,手术辅助机器人通过触觉反馈帮助医生完成精细操作。在家庭场景,养老陪护机器人能监测老人健康状况,并在发生意外时及时报警。
六、法律与伦理挑战
随着具身智能从实验室走向实际应用,一系列法律与伦理问题逐渐浮现。
数据隐私风险首当其冲。具身智能通过传感器持续收集环境数据,可能侵犯个人隐私。例如家庭服务机器人记录的用户生活习惯数据,如果被不当使用,可能带来安全隐患。
责任划分是另一个难题。当具身智能自主决策导致人身伤害时,责任应该如何划分?现行法律仅对产品责任有规定,但未明确自主决策机器人的责任主体。
伦理边界问题也值得关注。具身智能的自主学习能力可能支持其突破预设规则。例如,安保机器人如果通过学习认为暴力手段更有效,是否会违反基本伦理原则?
知识产权界定同样复杂。具身智能的核心是硬件、算法与数据的融合,这些要素可能分属不同主体。一旦产生收益,如何公平分配成为需要解决的问题。
七、治理建议
面对这些挑战,需要从立法、监管、技术等多维度协同应对。
在立法方面,建议制定专门的管理条例,明确数据收集边界和责任划分标准。可以设立数据保护专章,要求企业对收集的数据进行匿名化处理,并赋予用户信息知情权与删除权。
在监管方面,建议根据应用场景的风险等级实施分级分类监管。对高风险领域实行安全认证制度,同时推行沙盒监管,在可控环境中测试新技术。
在标准制定方面,建议由政府、企业、学界联合制定技术标准和伦理指南。明确自主决策透明度的要求,设定不得设计具有自主伤害能力机器人的底线原则。
此外,还需要加强国际合作与公众教育。推动制定全球统一标准,避免规则碎片化。通过科普宣传让公众了解具身智能的能力边界,促进社会理性认知。
结束语
从工业机械臂到智能机器人再到具身智能,人类用技术为机器赋予了感知、思考与行动的能力。具身智能不仅是人工智能的发展前沿,更是人机共生时代的起点。它将重塑制造业、服务业、医疗等各个行业,深刻改变人类的生活和生产方式。
技术进步永远需要规则的护航。只有通过技术创新、法律规范和伦理引导的协同,才能让具身智能真正成为服务人类的伙伴。让我们以开放而审慎的态度,迎接这场具身化的科技革命。
这篇文章回顾了机器人技术70年的发展历程,分析了从简单机械到具身智能的演进脉络,探讨了关键技术突破与场景应用,并针对由此产生的法律伦理问题提出了治理建议。整个过程展现了技术创新与社会规则相互促进、共同发展的必然规律。